
Parallel Gripper<em>.</em>
Parallel Gripper
2FPA-M/I-03-35/80 (Parallel Gripper with 3 kg Payload & 35/80 mm Stroke)

Product overview
- The two fingers remain parallel and the grip force remains constant throughout grasping.
- Can hold objects when the fingers move either inward or outward
- 2FPA-M/I-03-80-CO: Since no speed reducer is used, it exhibits high back-drivability. Through software-based impedance control, it emulates soft gripper behavior, making it suitable for handling easily deformable objects.
Product specifications
| Model | 2FPA-M-03-35 | 2FPA-I-03-35 | 2FPA-M-03-80 | 2FPA-I-03-80 | ||
|---|---|---|---|---|---|---|
| No. of fingers | 2 | |||||
| DOF | 1 | |||||
| Grip force | 72N | |||||
| Force-fit payload | 3kg | |||||
| Stroke | 35 mm | 80 mm | ||||
| Width range (internal) | 49 mm (max) - 12 mm (min) | 93 mm (max) - 12 mm (min) | ||||
| Width range (external) | 59 mm (max) - 22 mm (min) | 103 mm (max) - 22 mm (min) | ||||
| Closing time | 1.2s (default) / 1.0s (min) | 2.5s (default) / 2.0s (min) | ||||
| Weight | 0.73kg 1) | 1.0kg 2) | 0.80kg 1) | 1.07kg 2) | ||
| Dimensions (Gripper) | 70(W)×70(D)x113(H)mm | 70(W)×70(D)x137(H)mm | 114(W)×70(D)x113(H)mm | 114(W)×70(D)x137(H)mm | ||
| Supply voltage | 24 VDC | |||||
1) Including the MATC slave (MATC-10-S)
2) Including the drive unit and excluding the ATC slave & robot bracket
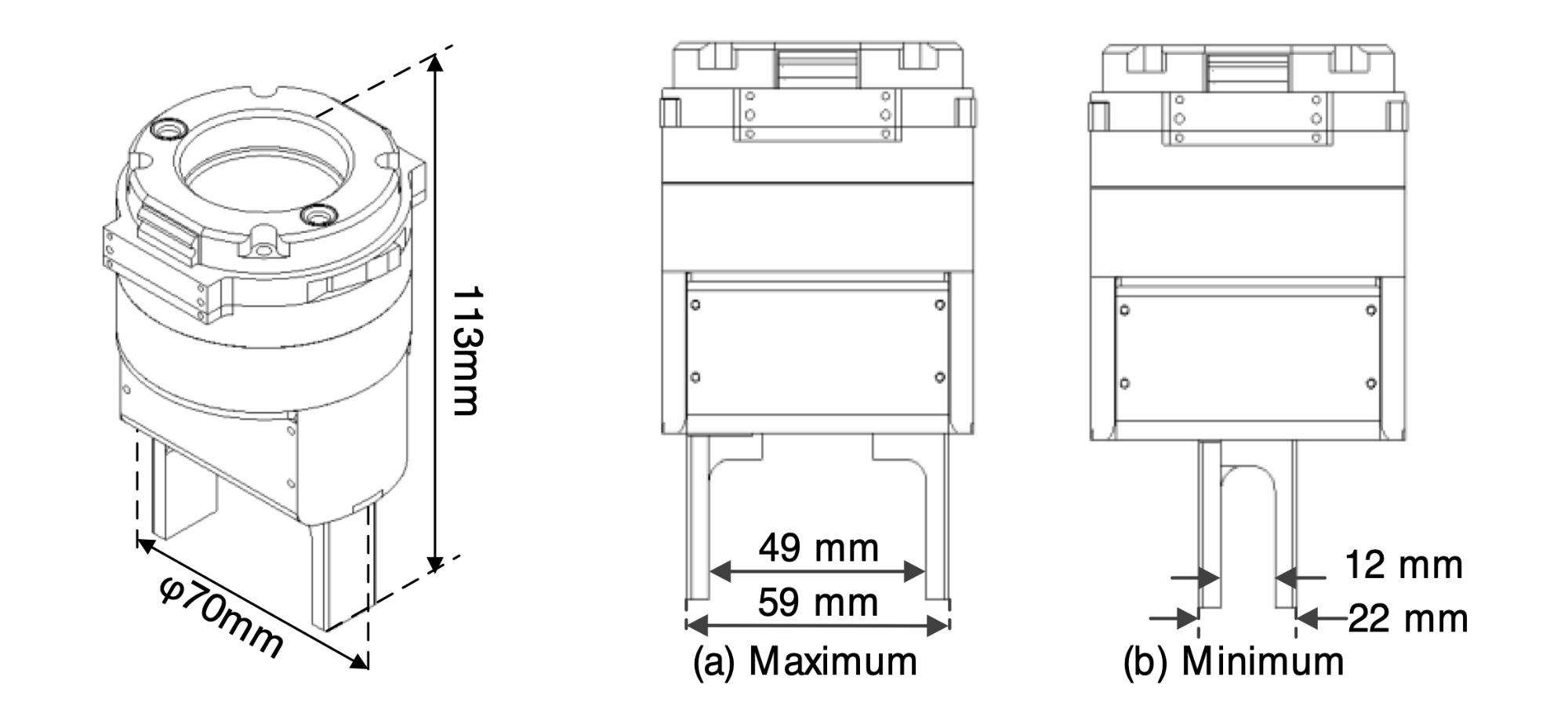
Dimensions of 2FPA-M-03-35
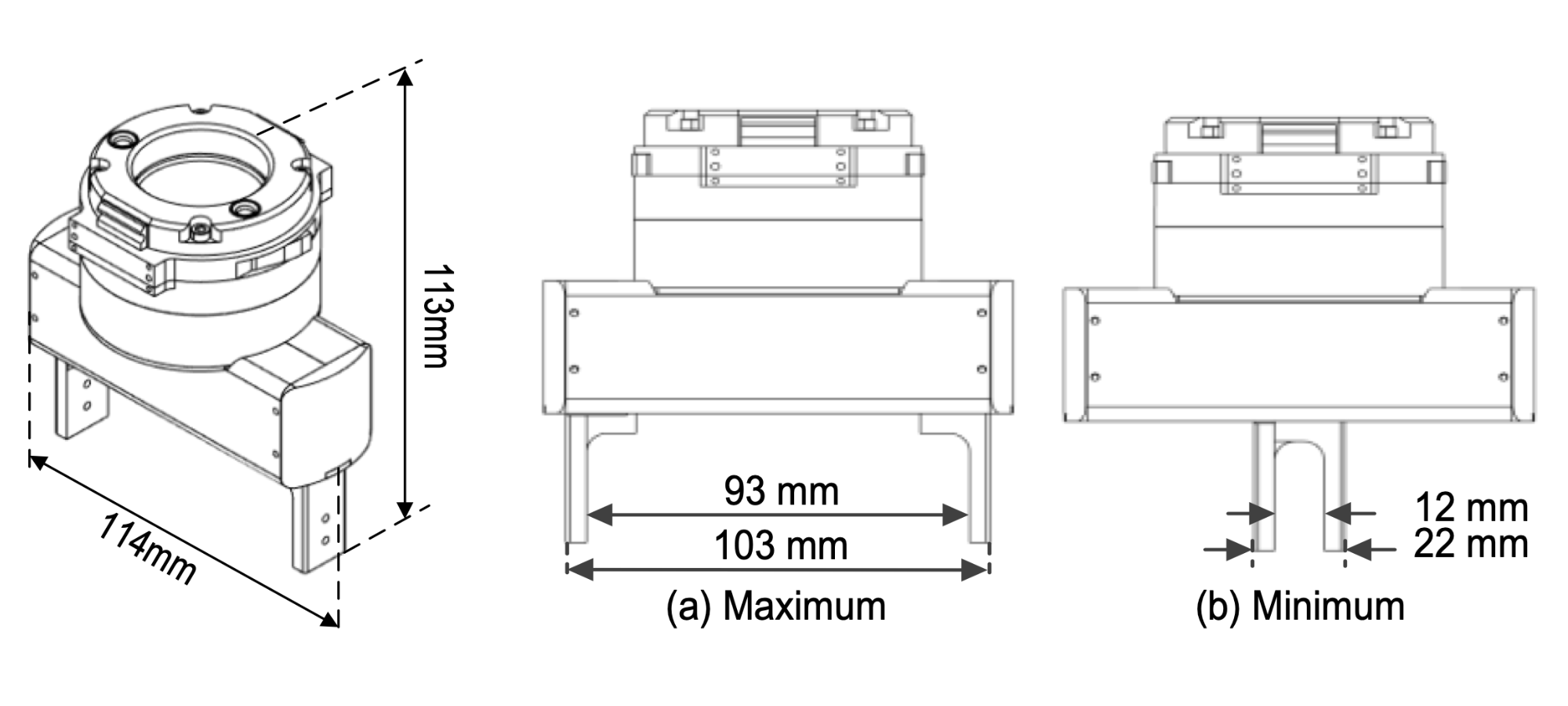
Dimensions of 2FPA-M-03-80